UNA
PAGINA DE DRONES, UAV, PARA LOS TOPOGRAFOS
MECINCA - Topografía Gps - Geodesia
Av. Fco. de Miranda, Edf. Galerias Miranda, piso 02, ofic. 210. Chacao.Caracas-Venezuela.
Fax: 58 212 2638818 Tnos: 58 212 2659809 / 2667954 / 2630639
RIF: J-00103064-6 NIT: 0072015592
Email: mecinca@mecinca.net www.mecinca.net
Los Cartografos, Topografos y entes relacionados con planos y terrenos, como la Agricultura Controlada, Catastros, Ingenieria Civil y muchos mas, en Venezuela y en el mundo entero, se ven premiados de nuevo, con la incorporacion de un nuevo sistema para Medicion de Terrenos y realizar Cartografia; los UAV, DRONES, o AVIONES y HELICOPTEROS CON CONTROL REMOTO, que en forma automatica, trabajaran en estas labores. Estos dispositivos los tenemos que dividir en dos categorias, los de ALA FIJA, y los de ALA ROTATIVA, los cuales son muy diferentes entre si. En ambos la filosofia es la misma, volar sobre una superficie determinada y con una CAMARA FOTOGRAFICA ir tomando fotografias del terreno con alto solapado entre las mismas, realmente lo que se realiza es un Levantamiento Fotogrametrico de dicha superficie. Una vez en tierra se descargan las fotografias y se procesan con Programas de Fotogrametria Automatica, de diferentes proveedores para obtener el resultado final, que serian los Planos del Levantamiento, con Curvas de Nivel, Ortofoto, Perfiles, y demas calculos deseados acerca de ese terreno, finca, autopista, o incluso Municipio que deseemos levantar por este metodo, el cual esta arrojando, cuando se realiza en forma muy correcta, 4 o 5 cms, de precision en HORIZONTAL y entre 6 y 10 cms de Precision en Vertical, y la misma resolucion en Tierra. Es decir que con un AVION de CONTROL REMOTO, de Fibra de Carbono, de 1 metro de longitud, con Propulsion por Motor Electrico, con UNA HORA de Autonomia, puedo levantar facilmente 40 Hectareas por vuelo, que suman unas 400 Hectareas por dia y mas.



Pulse con el Mouse para una PRESENTACION ACERCA DE DRONES , UAV, VANTS =
Muestra los principios fundamentales de los DRONES o UAV, sus divisiones o clases, el trabajo asignado a cada uno, y l.os mas importante, los Drones para Topografia y la Generacion de la Nube de Puntos mediante los algoritmos SIFT, asi como el calculo de la cota medinate las ecuaciones de Colinearidad, utilizando varios pares estereoscopicos para iterar y crear una elipse de error que satisfaga las necesidades de nuestro modelo digital de terreno o DTM.
Los DRONES en la Cartografia Automatica y la Generacion de la Nube de Puntos
Pero veamos el sistema para entenderlo bien
El corazon del equipo lo compone una Computadora de Navegacion, con un programa de Ciclo Cerrado, que interroga en forma continua al giroscopo INS, o Sistema Inercial, a los TRES Acelerometros, la brujula Electronica, el Altimetro Digital, y al GPS o GNSS que alimenta el IMU, resultando en un control continuo de los Alerones de Altura y Timon de Direccion, que pudiese estar, tambien estan bajo CONTROL MANUAL en manos del operador en tierra. Nos puede causar panico el tener que bregar con todos esos elementos, pero afortunadamente todos estan en una sola tarjeta electronica, no mayor de 10 cms de lado. Dicha tarjeta, contiene un programa de Navegacion, que por lo general por el Metodo de los Quaternios calcula y mantiene la direccion. Aqui hemos citado los Alerones y el Timon de Cola, porque nos hemos referido a un Avion de Ala Fija, pero en los casos de Ala Rotativa como los Cruadropteros, o los Optocteros, de Cuatro y Ocho Helices respectivamente, la Computadora de Navegacion, va a controlar los motores correspondientes, dandole mas velociodad a unos que a los otros, de acuerdo, si queremos subir, girar, ir hacia adelante a alta velocidad, etc., y para ello existen multitud de pequeñas tarjetas con IMU, ACELEROMETROS, BRUJULAS, ALTIMETRO, GPS e incluso radar de Altimetria, que ofrecen en forma abierta sus programas y sus capacidades de control para poder volar.
LA CAMARA
El Computador de Navegacion, entre otras de sus Responsabilidades esta la de DISPARAR en forma secuencial la CAMARA FOTOGRAFICA. De acuerdo a la Planificacion del Vuelo, el avion debera volar de ida y vuelta varias lineas, que no solo se solaparan de frente sino tambien lateralemnte con la linea anterior en la derecha o izquierda de la foto que se este tomando, en forma tal que cada dos o tres segundos se dispare la camara, la cual sera seleccionada, que tenga baja distorsion en los lentes, que disponga de enfoque fijo, y buena velocidad para guardar en memoria. Conjuntamente con la Fotografia, se guarda el estatus de la posicion de todo el sistema, IMU, Acelerometros, brujula, GPS, etc, para que el programa de Procesamiento, pueda Rectificar las imagenes y montar un gran mosaico digital de alta precision.


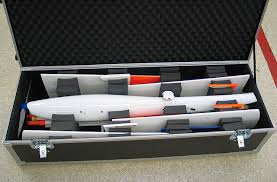

En su Estuche de Transporte Se pueden lanzar a Mano
VEAMOS TAMBIEN ALGUNOS DE ALA ROTATIVA MUY SIMPLE



Estos son Cuadropteros, pero los hay de OCHO motores y algun que otro de SEIS motores.
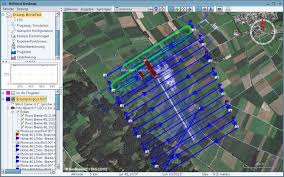
LA NAVEGACION POR PUNTOS DE RUTA O LOS LLAMADOS WAYPOINTS
Anteriormente hemos explicado que el Centro Neuralgico de la nave lo constituye el Computador de Navegacion, que utiliza Quaternios, es decir un Vector por cada Cuadrante espacial que funcionalmente es la solucion de las coordenadas Cartesianas a Vectoriales para asi calcular y actualizar la direccion y el desplazamiento. La unidad GPS, entrega soluciones cada segundo o tal vez cinco por segundo, que no son suficientes para mantener el Programa de Ciclo Cerrado, por lo que recurrimos a los IMU, o Giroscopos Inerciales con los ejes X,Y,Z, que reciben y se actualizan con el GPS, pero que entregan hasta Doscientas Soluciones por segundo, lo cual junto a la lectura del Compas Magnetico y de los Acelerometros en los ejes X,Y,Z, es posible calcular muchas soluciones por segundo para mantener los Alerones y el Timon activamente correjidos, a fin de navegar hasta el Punto de Ruta, es decir, una vez encendido el Avion, el computador de Navegacion, Calibra los Alerones y el Timon, y ve cual es el primer Punto de Ruta para NAVEGAR hacia el mismo. Como se trata de un programa especial de Fotogrametria, despues de pasar el punto de Ruta, si es el ultimo de la linea de Navegacion, entra en un ciclo de realizar un giro de 180 grados con desplazamiento lateral para navegar hacia el siguiente Punto de Ruta, hasta completarlos todos y proceder al aterrizaje,. en general lo suelen realizar en forma Automatica, en un Area Preseleccionada, y al mismo tiempo en form asistida por el controlador de mano del operador.
Los IMU o Sistemas Inerciales de Alta Precision, han sido y todavia algunos de ellos estan sujetos a grandes restricciones para su uso e importacion, pudiendo caer hasta dentro del marco del espionaje, si no se comunica exactamene al departamento de comercio de USA por lo general, de los trabajos y lugares que el IMU va a trabajar. Los mas costosos utilizan Giroscopos de Fibra de Optica, constituidos, por tres rollos, de unos Diez centimetros de diametro, Ortogonalmente montados en una caja, y cada rollo tiene muchas vueltas de fibra optica, mas de un Kilometro de fibra por rollo. En teoria la luz laser atrasa su fase o la adelanta segun giremos el rollo hacia adelante o hacia atras, y esta accion detectada por sensores, resuelve en forma submilimetrica el movimiento de cada eje. Es decir, una vez definido el vector Cero, el IMU entrega soluciones para envio de informacion a los alerones y timon y poder en forma continua correjir la Posicion de la Nave. Los IMUs mas economicos son del tipo MEM, o chips de la nanotecnologia, compuestos por especie de resortes que detectan el movimento hacia cualquiera de los ejes. Dichos IMU suelen incluso integrar GPS diferenciales, y no estan sujetos a ningun tipo de restriccion o control. De acuerdo a opiniones en seminarios especializados, lo mas importante en el DRONE son los sensores del mismo, sin menosprecio de la plataforma donde lo integremos. Por lo expuesto podemos encontrar DRONES por $1000 de costo, que tienen GNSS, IMU, Altimetro, Brujula Electronica, Acelerometros, y sensor Magnetometrico, en la parte cara lo mismo pero con altos indices de confiabilidad y exactitud, costando mas $100.000 y drones Multimillonarios. Pero los que aqui principalmente nos conciernen se mueven en el ambito de $5.000 a $90.000. , ya que estamos en el plano de los equipos profesionales, pensando en un "llave en mano".
PRESENTACIONES DE INTERES PARA ENTENDER EL MARCO TEORICO DE LOS DRONES O VANT.
---- Instrumentos Inerciales. Presentacion teorica de los Giroscopos e Instrumentos Inerciales, utilizados en Aviones, Barcos, Misiles o cualquier vehiculo Aereo, Maritimo o Terrestre, tripulado o no tripulado. Se presentan los Giroscopos clasicos, mecanicos, opto electronicos y los modernos MEMs producto de la nano ingenieria.
---- Un Clasico de la NASA con la teoria de la Navegacion. Ingles.
---- Un Analisis de Sensibilidad de la nueva Fotogrametria Automatica. Ingles
---- Navegacion Inercial para Misiles Guiados.
---- UAV for Mapping. Teoria de la Fotogrametria por DRONES
---- Introduccion al Control de Navegacion. Marco teorico muy completo para los mque deseen estudiar los Inerciales.
---- Algoritmos de Navegacion para IMUs de bajo costo. Es un estudio muy completo, 235 paginas para los grandes teoricos.
---- The development of motion tracking algorithms for low cost inertial measurement units
---- Autopilots for Small Unmanned Aerial Vehicles: A Survey. Una maravilla de presentacion, que nos resume practicamente los sistemas disponibles.
---- Digital Mapping Using Low Altitude UAV. Una empresa Hungara presenta lo que realizan con sus UAVs
---- Fatima nos trae de Portugal un trabajo bien completo resepcto a los VANT o DRONES para cartografia.
---------------------------------------------------------------------------------------------------------------------------------------------------------
ALGUNAS PUBLICACIONES DE LOS ASPECTOS LEGALES PARA EL USO DE LOS UAV , DRONES O VEHICULOS AEREOS NO TRIPULADOS
En Venezuela no se conocen actualmente las reglas de juego para el uso de los Aviones o naves no Tripuladas, salvo algunas disposiciones que atañen a los modelos deportivos o aeromodelos, donde se establece que hay ser miembro de algun aero club autorizado y volar en los sitios designados para ello.
Pero los UAV con aplicacion en la Topografia y Fotogrametria Automatica en pequeña escala, no dejan de ser captadores de datos Geograficos Terrestres, y estan bajo la tutela del Instituto Geografico de Venezuela Simon Bolivar, IGVSB, y aunque no se conocen reglas ni decisiones al respecto, seria bueno preguntar a los citados entes, antes de salir a volar uno de estos costosos equipos y encontrarnos con la Guardia a mitad de camino. Para algunos usuarios son juguetes caros, y para otros herramientas avangard de produccion, pero ambos deben responder por el riesgo asociado al volar una de estas aeronaves. El piloto, aunque en tierra, debe ser calificado, certificado y por supuesto entrenado por un ente autorizado para tales fines, ya que debe conocer las restricciones que con llevan estos vuelos, realizar reconocimientos previos, y prevenir, aunque sea redundante el decirlo, los riesgos, por ejemplo, vuelos sobre lineas de alta tension, sobre areas de riesgo no permitidas, como refinerias o campos petroleros, y responder con un seguro que ampare cualquier daño que la nave pudiese realizar. Todo esta muy fresco, pero las leyes surgiran, ya que son " juguetes no muy caros, que pueden dar muchos dolores de cabeza". He aqui algunas leyes que he encontrado y que pudiesen ser interesantes, para tener alguna pauta sobre este delicado asunto.
Un marticulo interesante sobre la actualidad de los drones en Venezuela: http://elestimulo.com/climax/drones-el-punto-debil-de-miraflores/
------LOS DRONES, UN NUEVO SOCIO EN EL ESPACIO AÉREO DE COLOMBIA
------ Nota informativa de AESA sobre el uso de Drones
-----SISTEMAS DE AERONAVES NO TRIPULADAS UAV
----- LEGISLACION ESPAÑOLA SOBRE AERONAVES NO TRIPULADAS. Muy reciente de Mayo 2014
LAS EXCEPCIONES segun USA
AEROMODELISMO
A este momento ya se ha definido parte de la Legislacion, y se establecen categorias entre aparatos de aero modelismo, que requieren que se vuelen unicamente en Clubes o en sitios donde no pasen en absoluto sobra la poblacion civl y a alturas menores a 50 metros. Incluye la prohibicion en parques publicos y otros lugares de aglomeracion ciudadana.
DRONES PROFESIONALES
Los UAVs o DRONES para trabajo de servicios profesionales y o levantamientos de planos, bien sea para Agricultura, Monitoreo de Torres Electricas o Refinerias, toma de Eventos o Fotografia o tomas de Cine en general, requieren que la empresa que maneja el DRONE tenga una excepcion, y que el piloto o pilotos, hayan sido entrenados y tengan su diploma reconocido. Se maneja la regla de que los vuelos deben ser a una altura maxima de 150 metros, no deben tener aeropuertos cercanos a 8 kilometros, y pedir un permiso previo a la zona a volar, restringiendo el paso por zonas especiales como: fuertes militares, campos petroleros, represas y reservas de agua, penales, refinerias, y cualquier otro lugar considerado estrategico. Los pilotos, bien sea en vuelo automatico o asistido, siempre deben ver la aeronave, por lo que se especulan distancias maximas de vuelo de 3 Km. en linea de vista, y la nave debe aunque vuele en forma Automatica, dejarse controlar de inmediato por el operador de tierra si asi lo requiere. En los ultimos cuatro meses ( año 2015), se han otorgado en USA mas de 600 excepciones, para todo tipo de servicios y labores de monitoreo, agricultura, servicio de lineas de alta tension, vigilancia de trafico terrestre, busqueda y salvamento, chequeo de gasoductos y los que se pueda imaginar. Es curioso que una de las determinaciones respecto a los drones de reporteros graficos, es que en forma absoluta, no pueden volar los drones sobre los estadios.
Brasil ya tiene reglas y legislaciones claras y precisas para el uso y control de los Drones, incluso posee escuelas de entrenamiento para el uso de los mismos, y aparentemente Argentina, Chile, Costa Rica y Colombia tambien se han pronunciado al respecto.
EL POS PROCESO DE LOS VUELOS
La siguiente seccion, sera una exposicion de los diferentes
software de postproceso de las imagenes captadas, que incluye la Descarga de Imagenes con sus correspondientes Camaras o Camara, el establecimiento de Puntos
de Control o GCPs, el Ajuste del Bloque ( Bundle Adjustment), localizacion de los Puntos SIFT, el apareamiento en diferentes imagenes para calcular Cotas y generar la Nube de Puntos, y obtener el DTM
para proceder a la Ortorectificacion y generacion del Mosaico, con sus correspondientes
subproductos de Perfiles, Curvas de Nivel, Graficos de Pendientes,
Medida de Areas, Calculo de Volumenes, y muchas mas cosas que podemos
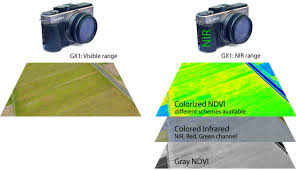
obtener de nuestro vuelo. Adicionalmente, se estan calculando y normalizando los niveles de reflectancia del RGB, y se esta incluso tomando imagenes NIR, lo que permite crear firmas espectrales y poder en forma inteligente discriminar ciertos objetos y su calidad, para en forma estacional, pronosticar lo que pudiese suceder por ejemplo con la cosecha de maiz o arroz, para asimismo descubrir areas con falta de riego o de fertilizantes, entre muchas aplicaciones.
Hemos realizado varios experimentos con diferentes Software de Pos Proceso, y los resultados ha sido muy similares en cuanto a la Nube de Puntos final, pero algunos tienen ventajas muy poderosas, que por supuesto van acorde el precio del paquete. En el que funcionalmente hemos encontrado mas elementos de proceso ha sido en el de PIX4D, que despues de generar el DTM con sus curvas de nivel, crea el Ortomosaico y la vista 3D del modelo, pernitiendo realizar cortes de lotes de terreno para calcular sus Areas y Volumen, y editar las camaras, las cotas, y un sin fin de parametros a fin de mejorar o adecuar los resultados. Tambien tiene un procesador de indices de reflectancia de la imagen. Sense Fly en sus UAVs Ebee y Ebee-Rtk utilizan este mismo software. PIX4D es muy facil de usar y paso a paso lo van llevando a uno hasta finalizar el proceso. Comentaremos de otros softwares ...........
Tambien un punto muy interesante, quizas nocivo, es que lo que realmente se levanta es el DSM, o Modelo de Superficie del Terreno, y no el DTM propiamente dicho. Es decir, que al volar sobre arboles o arbustos, las curvas de nivel iran por encima de los mismos. Dado que el terreno refleja en forma directa ciertas regiones del Infrarojo, se esta jugando un poco a filtrar puntos SIFT que proceden del NIR, y eliminar puntos de copas y troncos, obteniendo en esta forma un modelo quasi DTM. En esta area se esta trabajando muy fuertemente y creemos se realizaran grandes progresos para no necesitar del LIDAR que nos de cotas de terreno.
Si se trata de un levantamiento topografico con cierta extension, donde intervienen sistemas de riego o grandes tablones para sembradios, como por ejemplo caña o maiz, es practicaemente necesario, tomar en cuenta los modelos geoidales, para dar Cotas a los GCP o Puntos de Control Terrestres. Si nuestra Cota deseamos que se encuantre dentro del decimetro, se hace necesario, la adopcion del modelo Geoidal VGM12 en el caso de Venezuela, y el modelo local correspondiente al lugar donde se realiza el proyecto. Si el programa de pos proceso GPS, o el sistema RTK no tiene modelo Geoidal Local, se pueden tomar en los GCP alturas elipsoidales, y por metodos manuales ( a pedal ), calcular las Ondulaciones Geoidales correspondientes y aplicarselas a las Cotas de los Puntos de Control. En proyectos mas criticos, se deberian tomar unas Transectas con Nivelacion Geometrica, para fijar las Cotas al maximo.
Unas paginas interesantes que nos pasearan en general por todo el ambito de los DRONES o Aviones no tripulados UAVs:
http://pix4d.com/products/
http://www.lisa-geosoftware.de/produkt_e.htm
http://palentier.blogspot.ca/2010/12/how-to-create-digital-elevation-model.html
http://dronemapper.com/node/17
http://www.bluemarblegeo.com/products/global-mapper.php
http://www.falconunmanned.com/falcon-why-mapping/
https://www.sensefly.com/drones/ebee-ag.html
http://uas.trimble.com/ux5
http://www.agisoft.com/
http://www.menci.com/uav-drone-mapping
http://www.mavinci.de/
Pagina mantenida por Ing. Antonio Marquez Prieto / MECINCA